GATE 2009
1.
GATE 2010
GATE 2011
GATE 2012
GATE 2013
1. Which of the following logging techniques is best suited to estimate the shaliness of hydrocarbon reservoirs?
(a) Resistivity (b) Sonic (c) Induction (d) Gamma ray
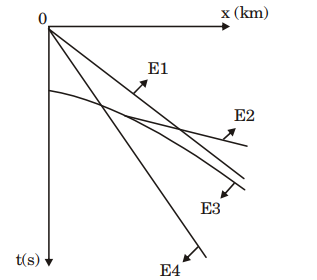
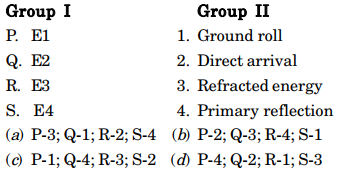
2. Match the items of Group I with those of Group II
Group I Group II
P) Caliper log 1) Permeability
Q) NMR log 2) Resistivity
R) Neutron log 3) Diameter
S) SP log 4) Velocity
5) Porosity
(a) P – 3, Q – 4, R – 2, S – 5 (b) P – 3, Q – 1, R – 5, S – 2
(c) P – 4, Q – 2, R – 4, S – 3 (d) P – 1, Q – 3, R – 2, S – 4
GATE 2014
1. The following gamma r ay (GR) log data are recorded in a borehole: GR log value against a formation = 30 API units, Maximum GR log value = 45 API units, Minimum GR log value = 20 API units. What is the fraction of shale in the formation?
(a) 0.33 (b) 0.40 (c) 0.66 (d) 0.75
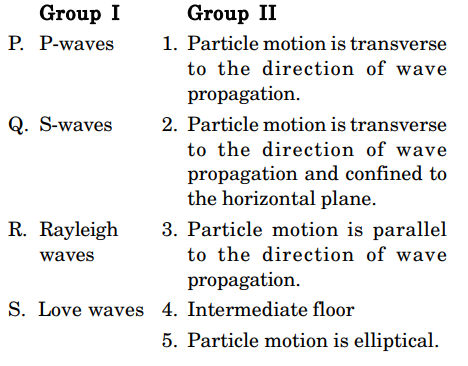
2. Match the type of well logs (listed in Group I) with the characteristics of measurement (listed in Group II).
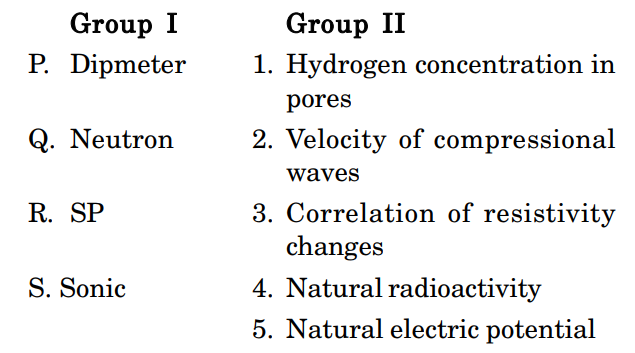
(a) P – 3; Q – 1; R – 5; S – 2 (b) P – 4; Q – 1; R – 5; S – 3 (c) P – 3; Q – 4; R – 5; S – 2 (d) P – 3; Q – 1; R – 4; S – 2
GATE 2015
1. Which one of the following logging methods is NOT used to determine porosity?
(a) Sonic (b) SP (c) Neutron (d) Gamma-gamma
2. A clean, thick and hydrocarbon bearing sandstone bed can be identified through a combination of
(a) low SP and high resistivity (b) large SP and high resistivity
(c) low transit time and high resistivity (d) large SP and low resistivity
3. I n a consolidated sandstone formation, the interval transit times of the formation, matrix and fluid are 70 µs, 55 µs and 190 µs respectively. The porosity of the formation is ______.
GATE 2016
1. In resistivity logging using a ‘Normal device’, the distance between electrodes A and M is 0.40 m. If 20 mA current generates 10 mV potential, the apparent resistivity of the layer between the electrodes is _________ ohm-m. (Use \(\pi\) = 3.14)
2. A cylindrical sandstone core sample of diameter 0.02 m and length 0.04 m is fully saturated with brine solution of resistivity 0.5 ohm-m. The resistance of the saturated sample measured in the laboratory is 500 ohm. The formation factor of the sample is __________. (Use \(\pi\) = 3.14)
GATE 2017
1. Which one amongst the following logging tools has the largest depth of investigation?
(a) Density (b) Laterolog 3 (c) Laterolog 8 (d) Neutron
2. The most abundant radioactive isotope in the continental crust is
(a) \(_{40}K\) (b) \(_{232}Th\) (c) \(_{235}U\) (d) \(_{238}U\)
3. The characteristic log response of a thick coal seam are
(a) low transit time, low resistivity and high gamma ray count.
(b) low transit time, high resistivity and low gamma ray count.
(c) high transit time, high resistivity and low gamma ray count.
(d) high transit time, low resistivity and high gamma ray count.
4. The SP response of a thick, clean sandstone bed is – 54V. Given the mud filtrate resistivity to be 0.45 ohm-m at a formation temperature (\(T_f\)) of 130°F and the coefficient, K = 77.29, the formation water resistivity is _________ohm-m.
5. Which one of the following log responses is TRUE for a porous and permeable sandstone bed, when the resistivity of the mud filtrate used in equal to the resistivity of the formation water?
(a) A large negative SP is observed.
(b) A large positive SP is observed.
(c) LLs and LLm logs show appreciably large separation.
(d) LLm and LLd logs overlap with each other.
GATE 2018
1. If the total porosity of a soil is 20%, its void ratio (%) is _________.
2. Assertion (a) : The Static Self-Potential for a thick , clean freshwater bearing sandstone formation is positive.
Reason (r) : Resistivity of the formation water is less than the resistivity of salt water mudfiltrate.
(a) Both (a) and (r) are true and (r) is the correct reason for (a).
(b) Both (a) and (r) are true and (r) is not the correct reason for (a)
(c) Both (a) and (r) are false.
(d) (a) is true but (r) is false.
3. Which one of the following well log responses characterizes an over pressured zone in the subsurface?
(a) High velocity and high resistivity.
(b) Low velocity and low density.
(c) High velocity and low resistivity.
(d) Low velocity and high density.
GATE 2019
1. Which one of the following clay minerals contain potassium (K)?
(a) Illite (b) Kaolinite
(c) Montmorillonite (d) Vermiculite
2. A high frequency acoustic wave propagating in a gas saturated sandstone formation exhibits an increase in __________ .
(a) frequency (b) velocity (c) wavelength (d) wave number
3. Which one of the following logging methods uses a radioactive source in the sonde?
(a) Natural Gamma ray
(b) Gamma-Gamma
(c) Natural Gamma ray spectroscopy
(d) Nuclear Magnetic Resonance (NMR)
4. Which one of the following is CORRECT for the density porosity (\(\phi_D\)) and neutron porosity (\(\phi_N\)) estimated for a finely interbedded organic-rich, shaly sandstone formation relative to those for a shale-free sandstone formation at shallow depths?
(a) \(\phi_N\) decreases and \(\phi_D\) increases.
(b) \(\phi_N\) increases and \(\phi_D\) decreases.
(c) Both \(\phi_N\) and \(\phi_D\) decrease.
(d) Both \(\phi_N\) and \(\phi_D\) increase.
5. Which one of the following statements is INCORRECT with regard to Nuclear Magnetic Resonance (NMR) logging? (\(\phi_{NMR}\) - NMR derived total porosity, \(\phi_N\) - Density porosity)
(a) The relaxation time (T2) decreases with decrease in pore size.
(b) The \(\phi_{NMR}\) is greater than \(\phi_N\) in a water saturated sandstone formation.
(c) The NMR logs provide lithology independent measurement of total porosity.
(d) The \(\phi_{NMR}\) is less than \(\phi_D\) in a gas saturated shaly sandstone formation
6. The bulk resistivity of a carbonate formation having 10% porosity which is 75% saturated with hydrocarbons is 500 ohm-m. The bulk resistivity of the formation when the porosity is doubled and 100% saturated with water is ______ ohm-metres, (round off to 1 decimal place).
(Assume the tortuosity, cementation factor and saturation exponent to be 1, 2 and 2, respectively).
GATE 2020
1. During ‘K - capture’ nuclear transmutation process
(a) both atomic number and atomic mass increase
(b) atomic number decreases but atomic mass remain same
(c) atomic number increases but atomic mass remain same
(d) both atomic number and atomic mass decreases
2. Which one amongst the following logs has the maximum depth of investigation?
(a) Neutron log (b) Natural Gamma - ray log
(c) Lateral log (d) Density log
3. Which one of the following does NOT contribute to the supression of SP log response for a thin, shaly, gas bearing sandstone formation? (Resistivity of mud filtrate > resistivity of formation water)
(a) Increase in shale content
(b) Increase in hydrocarbon content
(c) decrease in the thickness of the bed
(d) Increase in the salinity of formation water
4. The crossover observed for a hydrocarbon-bearing sandstone formation in the plot Neutron and Density porosity logs (\(\phi_n\) – Neutron porosity and \(\phi_d\) –Density porosity) is due to
(a) increase in \(\phi_d\) and decrease in \(\phi_n\)
(b) decrease in \(\phi_d\) and increase in \(\phi_n\)
(c) increase in both \(\phi_d\) and \(\phi_n\)
(d) decrease in both \(\phi_d\) and \(\phi_n\)